
Главная » Образовательная программа Института механики МГУ » Задача позиционирования однозвенного манипулятора конечной жесткости
Задача позиционирования однозвенного манипулятора конечной жесткости
27.03.2006, Современные роботы-манипуляторы с высокой точностью воспроизводят заданное положение концевого звена – «схвата» робота. Точность обеспечивается за счет того, что конструкцию манипулятора делают жесткой и ее деформация при выполнении операции незначительна. При этом масса манипулятора 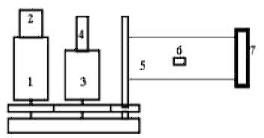 оказывается в сотню раз больше массы полезного груза. Но можно создать такие законы управления манипулятором, что точность выполнения задания не требует высокой жесткости его конструкции, в результате чего масса манипулятора может быть существенно снижена. Именно этой проблеме и посвящена данная лекция.
оказывается в сотню раз больше массы полезного груза. Но можно создать такие законы управления манипулятором, что точность выполнения задания не требует высокой жесткости его конструкции, в результате чего масса манипулятора может быть существенно снижена. Именно этой проблеме и посвящена данная лекция.
Рассмотрим одну задачу, возникающую при создании лабораторной установки, моделирующей работу звена робота-манипулятора, управляемого через редуктор двигателем постоянного тока и снабженного датчиком угла поворота, тахометром и тензометром.
Электромотор 1 (с датчиком угловой скорости 2) через редуктор 3 (с потенциометрическим датчиком угла 4) вращает в горизонтальной плоскости гибкую пластину 5 (с тензометрическим датчиком 6), на конце которой прикреплен груз 7. Такая система управления может обеспечить точное позиционирование груза.
Двигатель – микродвигатель постоянного тока ДПР-62-N2-02: полый ротор, механическая постоянная времени – 20 мкс, электрическая постоянная времени – 0,5 мкс. Датчик угловой скорости – тахометр. Редуктор – с передаточным отношением 100. Пластина – массой 100 г, с поперечным сечением 1 × 61 мм и длиной 250 мм. Груз – цилиндр радиуса 20 мм и массы 615 г.